





联系人:潘小姐
手机:17507552151(微信同步)
电话:0755-85275462
Q Q:946445659
邮箱:psq@hw-robots.com
网址:www.hw-robots.com
地址:中国·广东省深圳市宝安区福海街道桥头社区立新路2号天佑创客产业园A栋1楼

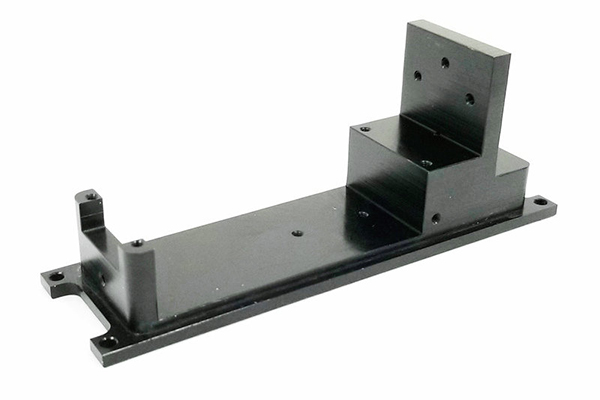
精密机器人本体零件加工的工装夹具差错包括定位差错,夹持差错,工装夹具安裝差错和刀具设置差错。这种差错要害与工装夹具的生产制作和装配线精度相关。数控加工精度并有缺憾,要是将差错操作在一定领域内,就不简单有哪些实际意义。专用工具生产制作差错和损坏。定位差错要害包括参照未指向差错和定位子生产制作差错差错。在数控车床上机器人本体零件加工厂工件时,务必选择工件上的几个几何图形原素做为加工的定位参照。假设使用选中的定位参照和设计理论。

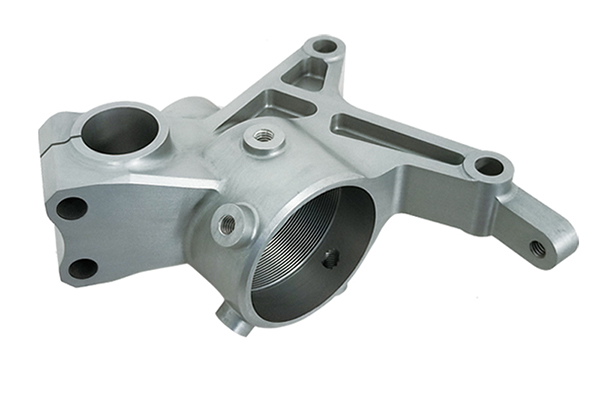
在高精密零件加工全过程中,精密机器人本体零件加工工件置放于基本上,应在随意情况下地面找平,随后将地脚螺丝匀称地卡紧。针对一般机床,水平仪读值不超越0.04/100mm,针对机器人本体零件加工厂高精度的机床,水平仪不超越0.02/100mm。在精确丈量装置精度时,应在安稳溫度下开展,丈量仪器须经一段恒温時间后再应用。机床装置时要不遗余力避免使机床形成逼迫形变的装置方式。机床装置时不行随意拆下来机床的一些构件,构件的拆装将会形成 机床热应力的分配,进而影响机床精度。

首要是操作数控机床进行精密机器人本体零件加工的编程、加工。1、担任机器人本体零件加工厂的操作、保护与日常保养,了解加工中心组机床的性能与底子结构;2、遵守出产组织进行产品试制及批量出产,按图纸要求对产品进行处理确保产品质量;3、能看懂图纸及相关工艺技能文件,帮助分析,处理和处理质量问题,并提出改进方案;4、与质检部分活泼协作,发现量具有失准现象及时告诉其主管,由质检部校对;5、与技能部分和谐处理技能难题,活泼供给有关方案,及时处理现场问题;
1、熟练掌握加工准则及流程。加工者在运用常见的CNC加工术时,要按照先粗加工、再精加工、避免工件热变、减小振荡等准则进行。同时,还要具有处理各种突发问题的才能,比如:如何调理刀具转速等。2、熟知机器人本体零件加工厂的自动或手动操作。加工员应明确知道,什么工序需要手动操作,手动操作时,机床的正常运作状态是什么;自动操作适用于何种工序,机床又该处于何种状态。专业的精密机器人本体零件加工员表明,熟悉上述操作,有助于加工工作的开展,以及对任何情况都能应对自若。
柔性加减速操控基本思想:在机器人本体零件加工厂傍边,一般是由体系程序直接实现特定的自动加减速操控功用。在这方式下,要对体系加减速特性进行改动或加减操控修改数控程序,因此普通用户无法按自己的志愿使数控机床具有较佳的加减速功能。所以咱们提出的柔性加减速操控方法则选用数据库的原理,将加减速操控分为加减速描绘与施行两部分,并将加减速描绘与体系程序相分离。精密机器人本体零件加工柔性自动加快操控:设定加快曲线,解析曲线和非解析曲线,将其作为样板以数表的形式存放于加减速曲线库中。

